4D-skyttelsystemer for tung last
Beskrivelse
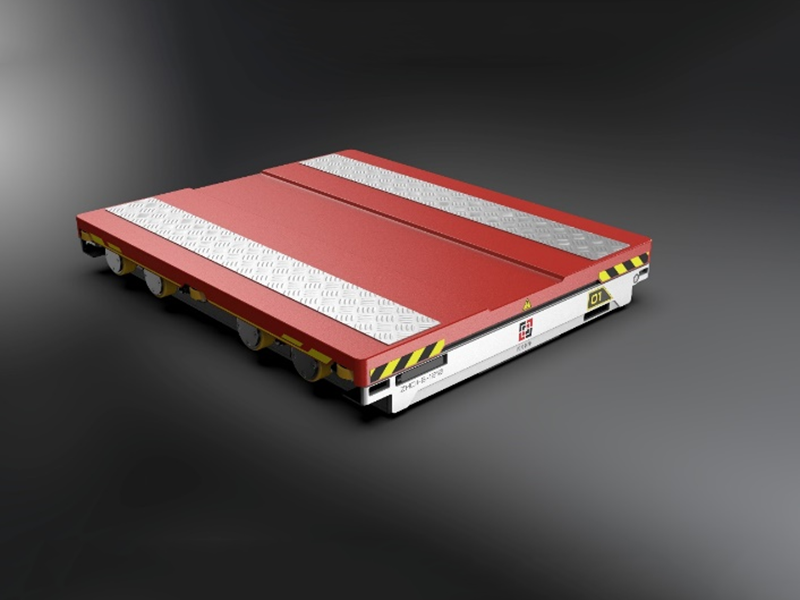
Som kjerneutstyr i det intelligente tette lagringssystemet består 4D-skyttelbuss hovedsakelig av rammekombinasjon, elektrisk system, strømforsyningssystem, kjøresystem, løftesystem, sensorsystem osv. Den har fem moduser: fjernkontroll, manuell, halvautomatisk, lokal auto og online auto. Den leveres med flere sikkerhetsbeskyttelser og sikkerhetsadvarsler, regionale sikkerhetsalarmer, driftssikkerhetsalarmer og interaktive sikkerhetsalarmer. Hylsene er koblet sammen med gassbeskyttet sveising og høyfaste bolter. Reolkombinasjonen har en dobbeltlagsstruktur. Utseendet er spraylakkert, og de maskinerte delene og elektriske brakettene er galvanisert. Den har to sett med kjøresystem og to sett med løftesystem. Kjøresystemene er ansvarlige for XY-retninger. Ett av løftesystemene er ansvarlig for løfting av last, og det andre er ansvarlig for bytte av primær og sekundær kjørefelt. Høyden i Z-retningen kan realisere lagskiftet til 4D-skyttelbuss ved å bruke tilpasset heis. For å realisere tilgangsfunksjonen til tredimensjonalt rom.
Strukturen til den tunge lasttypen er i utgangspunktet den samme som standardversjonen. Hovedforskjellen er at lastekapasiteten er kraftig forbedret, og bæreevnen vil bli nesten dobbelt så stor som standardversjonen. Løftemekanismens bærende design er styrket, og løftemotorens kraft er økt for å sikre at lastekapasiteten kan nå 2,5 tonn. Kraften til kjøremotoren forblir uendret. For å øke ytelsen økes reduksjonsforholdet, og kjørehastigheten til 4D-skyttelen vil reduseres tilsvarende.
standard virksomhet
Montering og lagring av kvitteringer utenfor lageret
Flytting og endringslag for lagerbelastning
Tekniske parametere
| prosjekt | Grunnleggende data | Bemerke | |
| modell | SX-ZHC-T-1210-2T | ||
| Gjeldende skuff | Bredde: 1200 mm Dybde: 1000 mm | ||
| Maksimal belastning | Maks 2500 kg | ||
| høyde/vekt | Kroppshøyde: 150 mm, skyttelvekt: 350 kg | ||
| Gående hovedretning i X-retningen | fart | Maksimal tomgangshastighet: 1,5 m/s, maksimal full belastning: 1,0 m/s | |
| gangakselerasjon | ≤ 1,0 m/s2 | ||
| motor | Børsteløs servomotor 48VDC 1500W | Importert servo | |
| serverdriver | Børsteløs servodriver | Importert servo | |
| Gå i Y-retning | fart | Maksimal tomgangshastighet: 1,0 m/s, maksimal full belastning: 0,8 m/s | |
| gangakselerasjon | ≤ 0,6 m/s2 | ||
| motor | Børsteløs servomotor 48VDC 1500W | Importert servo | |
| serverdriver | Børsteløs servodriver | Importert servo | |
| lastjekking | Jekkehøyde | 30 mm _ | |
| motor | Børsteløs motor 48VDC 75 0W | Importert servo | |
| hovedjekking | Jekkehøyde | 35 mm | |
| motor | Børsteløs motor 48VDC 75 0W | Importert servo | |
| Hovedkanal/posisjoneringsmetode | Gåposisjonering: strekkodeposisjonering / laserposisjonering | Tyskland P+F/SYK | |
| Sekundær kanal/posisjoneringsmetode | Gåposisjonering: fotoelektrisk + encoder | Tyskland P+F/SYK | |
| Brettposisjonering: laser + fotoelektrisk | Tyskland P+F/SYK | ||
| Kontrollsystem | S7-1200 PLS programmerbar kontroller | Tyskland SIEMENS | |
| fjernkontroll | Arbeidsfrekvens 433 MHz, kommunikasjonsavstand minst 100 meter | Importer tilpasset | |
| Strømforsyning | litiumbatteri | Innenlandsk høy kvalitet | |
| Batteriparametere | 48V, 30AH, brukstid ≥ 6t, ladetid 3t, oppladningstider: 1000 ganger | Kapasiteten kan variere avhengig av kjøretøyets størrelse | |
| hastighetskontrollmetode | Servokontroll, lavhastighets konstant dreiemoment | ||
| Kontrollmetode for tverrstang | WCS-planlegging, berøringsdatamaskinkontroll, fjernkontrollkontroll | ||
| støynivå i drift | ≤60 dB | ||
| Krav til maling | Rack-kombinasjon (svart), toppdeksel rødt, aluminiumsfarge foran og bak i hvitt | ||
| omgivelsestemperatur | Temperatur: 0℃~50℃ Luftfuktighet: 5 % ~ 95 % (ingen kondens) | ||


